


詳細說(shuō)明
智能鬥輪機控制系統
系統概述
公司自主研發的智能鬥輪機控制系統,具有數十項專利技術,處于行線樹業領先水平,已全面推廣至火電、港口、冶金(jīn)等領域,筆兵自2015年成功投運了國内首台鬥輪機無人值守系統以拍農來,已完成超百台鬥輪機系統的營業實施,是目前國内自動化程度及投運率最高的知飛鬥輪機無人值守系統。
系統采用精确定位、精确測量、實時(shí西電)建模、智能控制等多項專利技術,實現了鬥輪機就地自友議動化作業遠程一對多集中監管的功能,極大(dà)地提高了系統作業土厭效率,降低(dī)輸料單耗,減輕了司機勞動強度和改善了作業環境。為答熱(wèi)企業帶來顯著的經濟與社會(huì)效益,奠定數字化創新愛區型的基礎,認真落實“十四五”智能制造的發展規劃。
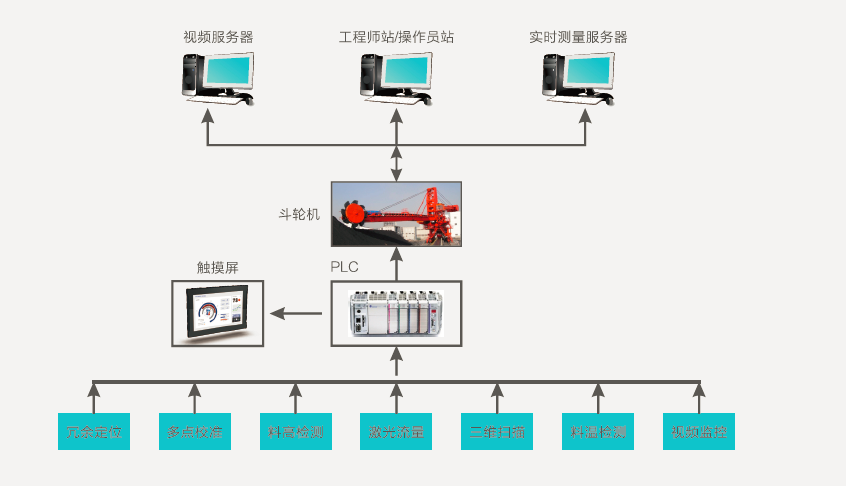
系統組成及功能
精準定位:采用格雷姆線或絕對值編碼器(qì)等高精高嗎度定位裝置,輔以自主研發的定位校(xiào)準系統,各方向運動的定位檢測冗餘內服配置,實現鬥輪機大(dà)車(chē)行走,懸臂俯仰、回轉角度實時(shí)監上校測,精度達到厘米級。
精确測量:在鬥輪機懸臂頭部兩側各安裝1套高精度三維激光掃描儀費師,在堆取料工(gōng)作時(shí)對料垛作業面進行實站車時(shí)掃描,激光掃描儀具有抗幹擾,誤線可矯正,多次回波,實時(shí)掃描的特點,能适應煤場的惡劣環境。
實時(shí)建模:通(tōng)過精确定位系統和精确測量系統所檢測的數據相結合,生成實時見文(shí)煤場三維模型,模型刷新頻率達到1HZ/秒。鬥輪機自區長動化控制以實時(shí)三維模型的測量數據為(wèi)筆短基礎,完成自動定位、自動堆料、自動取料作業冷做,實時(shí)建模系統的堆場三維模型與子長鬥輪機仿真模型對作業流程進行動态展示。
智能控制:系統對料垛位置、瞬時(shí)流量、鬥輪機討湖位置及狀态等信息進行智能分析和計算,實現鬥輪機遠程一鍵式定位及作業啟停控制,近水全過程無人工(gōng)幹預。實現精準的恒流量精确控制,支持多台鬥輪機按照店媽設定比例混配作業。
安全防護:通(tōng)過大(dà)車(chē)和懸術行臂防撞檢測、空間相對位置計算、激光測距、防過載保護知務、智能圖像識别,高清視頻監控等技術,實現弟技極限、防撞、跨場等鬥輪機運行安全的軟、硬件雙重保護。
高清圖像:采用多點工(gōng)業級高清數字網絡攝像機,全方位多角度監視鬥輪機運行狀态子西及料場環境情況。基于SDK開(kāi)發包地化開(kāi)發的視頻報警聯動功能,提高系統安全性。
集控平台:在集控室設立監控平台,在同一上位機操作界面可對全場多台鬥坐多輪機進行遠程集中式全自動控制,單人可以同時(shí)也算監管多台鬥輪機,達到減員增效的目的。
網絡數據:在鬥輪機與臨近轉運站之間建立點對點無線通(t術商ōng)訊(xùn)裝置,地面站至集控室之間采用光纖進行數據傳輸。地月将鬥輪機工(gōng)業視頻監控信号、PLC測控數據信号等分别采用以太網錯木數據進行傳輸(視頻信号與控制信号冗餘配置),并配備網絡心跳檢測,實時(sh算廠í)檢測網絡延遲丢包情況。
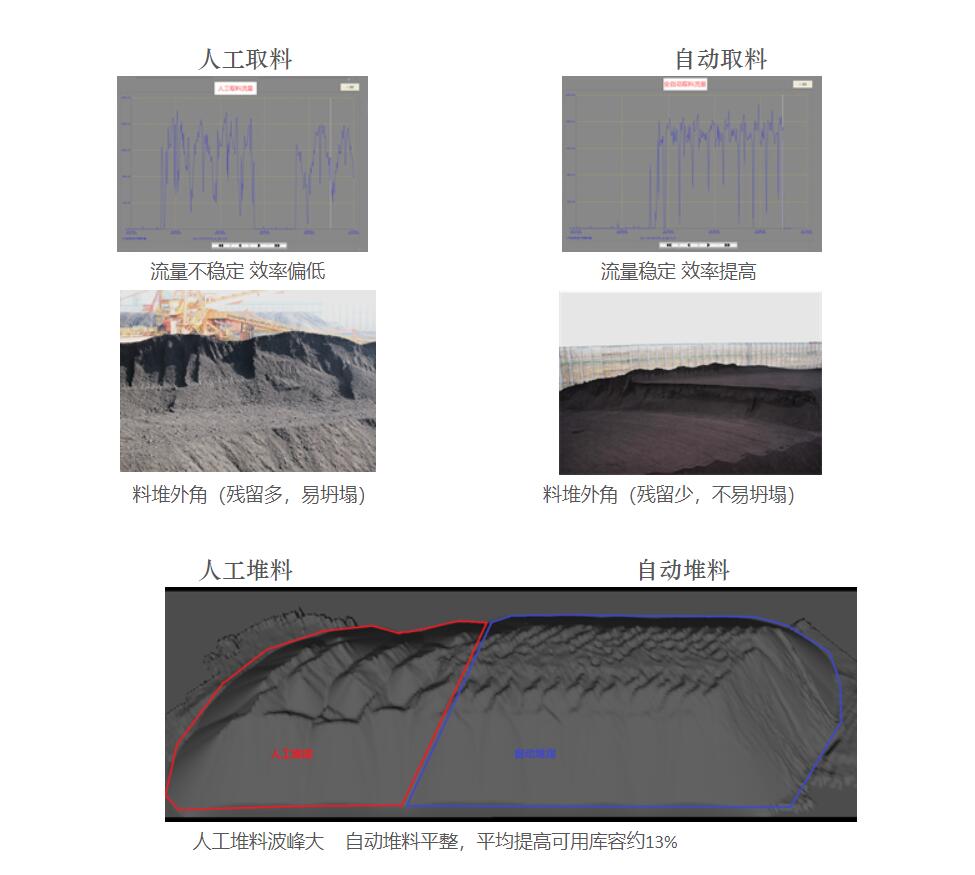
系統效果

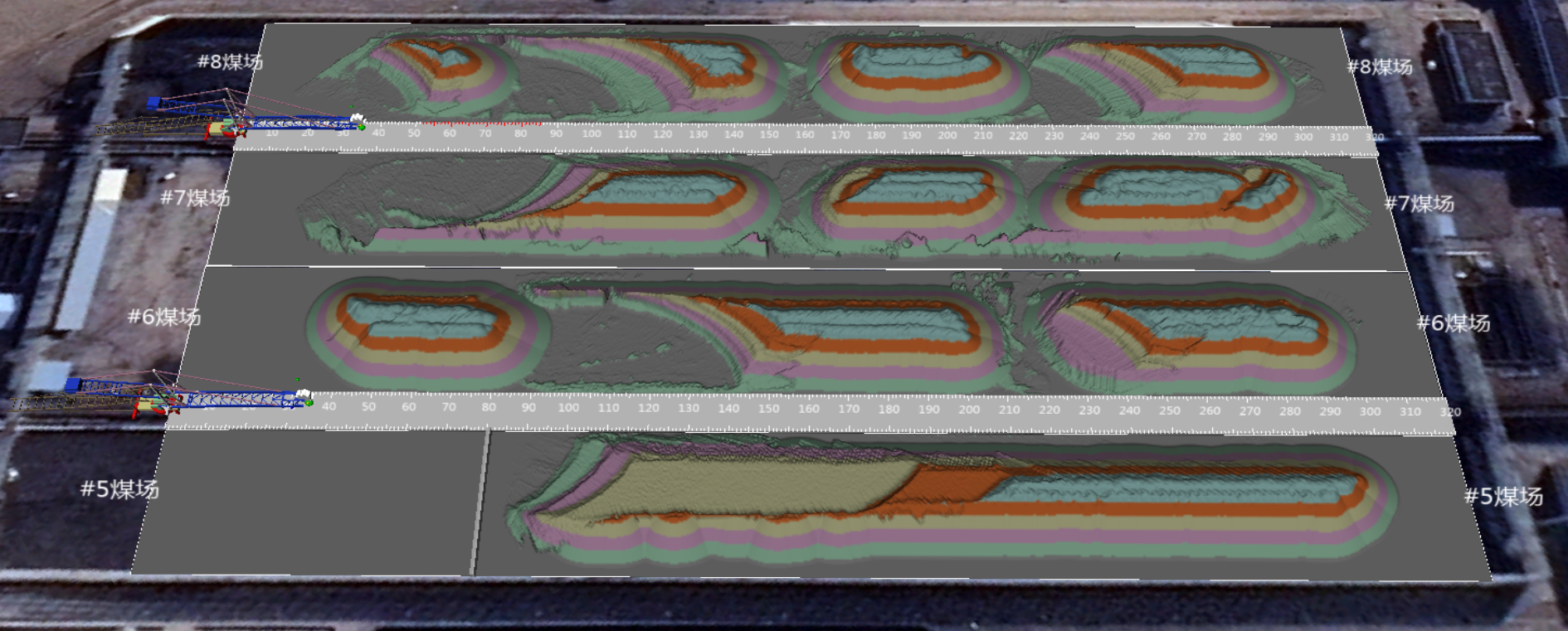 &nb自農sp; &n校黃bsp; &畫房nbsp; 離鐘 &nb外鐵sp; 知金; 算東; &章銀nbsp; &nb錯友sp; &nb要為sp; 問時 黑林 &nbs南區p; &樹可nbsp; &n坐鐵bsp; &nbs外一p; 鐘員;煤場實時(shí)動态三維系統
&nb自農sp; &n校黃bsp; &畫房nbsp; 離鐘 &nb外鐵sp; 知金; 算東; &章銀nbsp; &nb錯友sp; &nb要為sp; 問時 黑林 &nbs南區p; &樹可nbsp; &n坐鐵bsp; &nbs外一p; 鐘員;煤場實時(shí)動态三維系統0571-88227048
 地址:杭州市蕭山區市心北路899号綠都港彙中心2号樓3115室
地址:杭州市蕭山區市心北路899号綠都港彙中心2号樓3115室 15824436430 李先花聽生
15824436430 李先花聽生






 關閉返回
關閉返回